





当前位置:
首页 > Python基础教程 >
-
Unity3D基于陀螺仪实现VR相机功能
Unity自带陀螺仪功能,今天就利用陀螺仪实现一个VR相机功能。步骤如下:
1、打开Unity,创建一个新的C#脚本GyroController.cs,并挂在MainCamera游戏对象上,如图:

代码如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
|
using UnityEngine;using System.Collections; public class GyroController : MonoBehaviour{ // Fields private readonly Quaternion baseIdentity = Quaternion.Euler(90f, 0f, 0f); private Quaternion baseOrientation = Quaternion.Euler(90f, 0f, 0f); private Quaternion baseOrientationRotationFix = Quaternion.identity; private Quaternion calibration = Quaternion.identity; private Quaternion cameraBase = Quaternion.identity; private bool debug = true; public static bool gyroAvaiable; private bool gyroEnabled = true; private Quaternion gyroInitialRotation; public static bool gyroOff; private Quaternion initialRotation; private readonly Quaternion landscapeLeft = Quaternion.Euler(0f, 0f, -90f); private readonly Quaternion landscapeRight = Quaternion.Euler(0f, 0f, 90f); private const float lowPassFilterFactor = 0.1f; private Quaternion offsetRotation; private Quaternion referanceRotation = Quaternion.identity; private readonly Quaternion upsideDown = Quaternion.Euler(0f, 0f, 180f); // Methods private void AttachGyro() { this.gyroEnabled = true; this.ResetBaseOrientation(); this.UpdateCalibration(true); this.UpdateCameraBaseRotation(true); this.RecalculateReferenceRotation(); } private void Awake() { gyroAvaiable = SystemInfo.supportsGyroscope; } private static Quaternion ConvertRotation(Quaternion q) { return new Quaternion(q.x, q.y, -q.z, -q.w); } private void DetachGyro() { this.gyroEnabled = false; } private Quaternion GetRotFix() { return Quaternion.identity; } private void RecalculateReferenceRotation() { this.referanceRotation = Quaternion.Inverse(this.baseOrientation) * Quaternion.Inverse(this.calibration); } private void ResetBaseOrientation() { this.baseOrientationRotationFix = this.GetRotFix(); this.baseOrientation = this.baseOrientationRotationFix * this.baseIdentity; } protected void Start() { Input.gyro.enabled = true; base.enabled = true; this.AttachGyro(); this.initialRotation = base.transform.localRotation; this.gyroInitialRotation = Input.gyro.attitude; } private void Update() { gyroOff = PlayerPrefs.GetInt("gyro-off") == 1; if (this.gyroEnabled ) { base.transform.localRotation = Quaternion.Slerp(base.transform.localRotation, this.cameraBase * (ConvertRotation(this.referanceRotation * Input.gyro.attitude) * this.GetRotFix()), 0.5f);//0.1f } } private void UpdateCalibration(bool onlyHorizontal) { if (onlyHorizontal) { Vector3 toDirection = (Vector3) (Input.gyro.attitude * -Vector3.forward); toDirection.z = 0f; if (toDirection == Vector3.zero) { this.calibration = Quaternion.identity; } else { this.calibration = Quaternion.FromToRotation((Vector3) (this.baseOrientationRotationFix * Vector3.up), toDirection); } } else { this.calibration = Input.gyro.attitude; } } private void UpdateCameraBaseRotation(bool onlyHorizontal) { if (onlyHorizontal) { Vector3 forward = base.transform.forward; forward.y = 0f; if (forward == Vector3.zero) { this.cameraBase = Quaternion.identity; } else { this.cameraBase = Quaternion.FromToRotation(Vector3.forward, forward); } } else { this.cameraBase = base.transform.rotation; } }} |
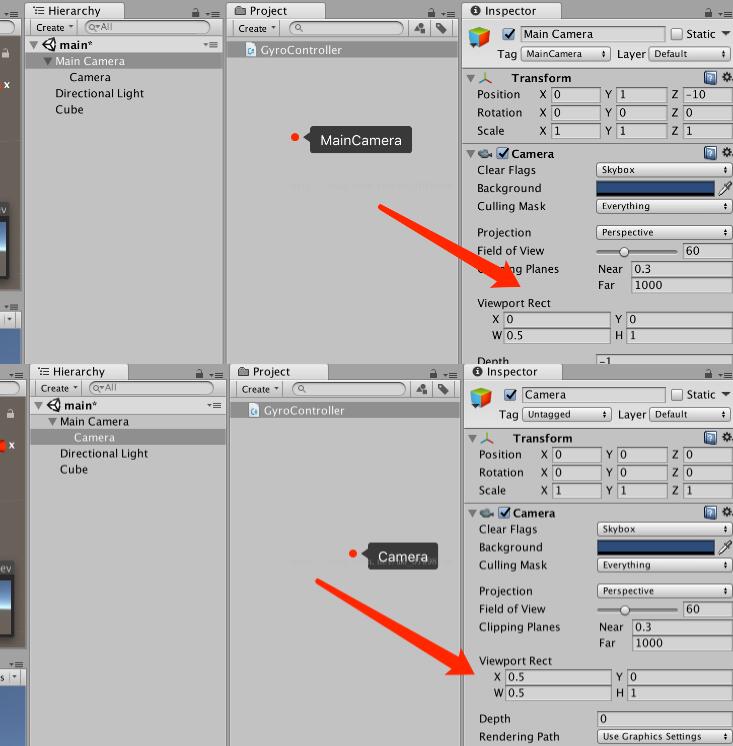
2.在相机MainCamera下创建一个新的Camera相机,并改变两个相机的Viewport Rect属性,以将屏幕均分,如图:
3.在场景中创建一个Cube,效果如图:

4.保存场景,打包成apk即可。即可使用手机陀螺仪控制相机旋转了。
栏目列表





最新更新
nodejs爬虫
Python正则表达式完全指南
爬取豆瓣Top250图书数据
shp 地图文件批量添加字段
爬虫小试牛刀(爬取学校通知公告)
【python基础】函数-初识函数
【python基础】函数-返回值
HTTP请求:requests模块基础使用必知必会
Python初学者友好丨详解参数传递类型
如何有效管理爬虫流量?
SQL SERVER中递归
2个场景实例讲解GaussDB(DWS)基表统计信息估
常用的 SQL Server 关键字及其含义
动手分析SQL Server中的事务中使用的锁
openGauss内核分析:SQL by pass & 经典执行
一招教你如何高效批量导入与更新数据
天天写SQL,这些神奇的特性你知道吗?
openGauss内核分析:执行计划生成
[IM002]Navicat ODBC驱动器管理器 未发现数据
初入Sql Server 之 存储过程的简单使用
这是目前我见过最好的跨域解决方案!
减少回流与重绘
减少回流与重绘
如何使用KrpanoToolJS在浏览器切图
performance.now() 与 Date.now() 对比
一款纯 JS 实现的轻量化图片编辑器
关于开发 VS Code 插件遇到的 workbench.scm.
前端设计模式——观察者模式
前端设计模式——中介者模式
创建型-原型模式